東北大学工学部機械系の小菅・平田研究室を取材しました
東北大学工学部機械系(バイオロボティクス専攻)の小菅・平田研究室から、
「食器洗浄・収納パートナロボット」プレス発表のご案内を頂き、取材へ行ってきました。

「食器洗浄・収納パートナロボット」は、人間の代わりに、
大量の食器の後片付けを手伝ってくれるロボットだそうです。
ロボットというと、何となく人型ロボット(ヒューマノイド)を想像しますが、
外観からしても、産業ロボットという印象です。
平田准教授曰く、ロボット研究は大きく分けると、
ヒューマノイドをつくるか・つくらないか、のふたつの流れ、つまり、
A.人間を模範として、それに近づくことを目標に設計されるロボット
B.実用化を重視して、ロボットだからこそできることを追求するロボット
があるそうで、こちらの小菅・平田研は、後者(B)を目指すスタンスなのだとか。
では具体的に、食器洗いの何を手伝ってくれるのかと言うと、
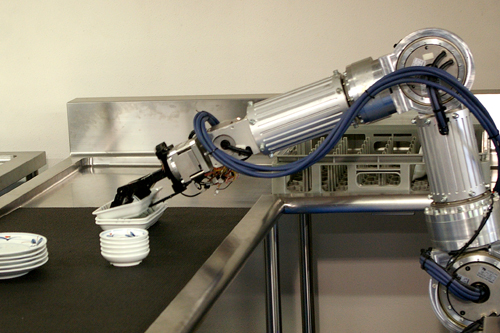
重なった食器を1枚ずつつかんで食器洗い機に入れ、
洗い終わった食器はかごに収納してくれるそう。
わかりやすいよう、同じ写真を少々加工してみました。
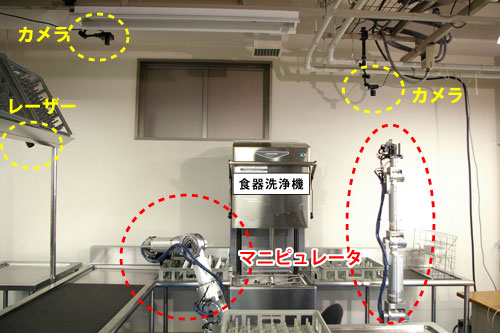
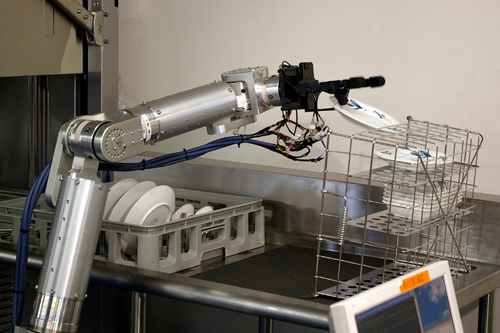
人間の手や腕に相当する「マニピュレータ」と呼ばれるタイプのロボットが、
食器洗い機の入口側と出口側に1台ずつ設置されています。

まずは人間の手によって、粗洗いをしたあと、大まかに分類した食器を置きます。

食器を見下ろす位置から撮影するカメラの画像や、
レーザによる3次元位置の計測結果をもとに、
事前に構築されたデータベース情報と照合することで、
食器の種類とつかむ位置、枚数を認識。
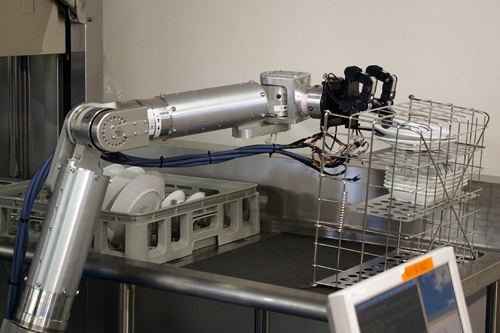
これによって、食器の種類や枚数、置く場所を変えても、
食器をつかむことができるように。
異なる食器を見分けて食器洗い機に並べたり、
洗い終わった食器を所定のかごに収納することができます。
事前にデータベース構築が必要なシステムのため、家庭用というより、
ある程度パターン化できる業務用への実用化が期待できる様子。
技術的には、重ねた皿をつかませることが難しいそうなのですが、
小菅・平田研では、あるシンプルな方法によって、この課題をクリアしたそう。
では、そのシンプルな方法とは?
詳しくは、記事をご覧下さい。
トラックバック(0)
このブログ記事を参照しているブログ一覧: 東北大学工学部機械系の小菅・平田研究室を取材しました
このブログ記事に対するトラックバックURL: https://field-and-network.jp/mtos/mt-tb.cgi/6893